
- 设备咨询热线:
13306125296 - 等离子配件咨询:









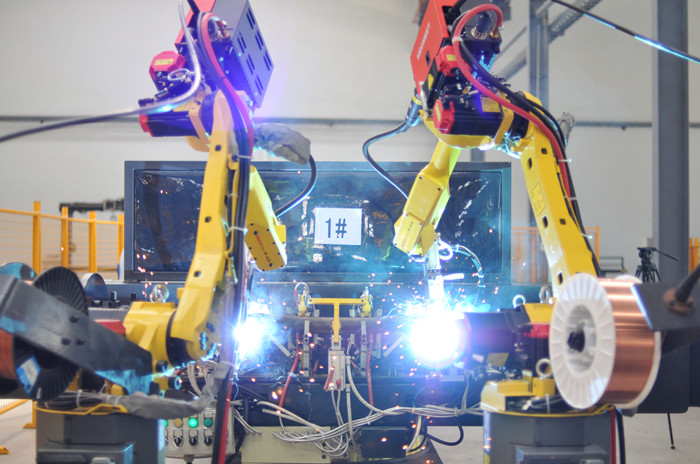




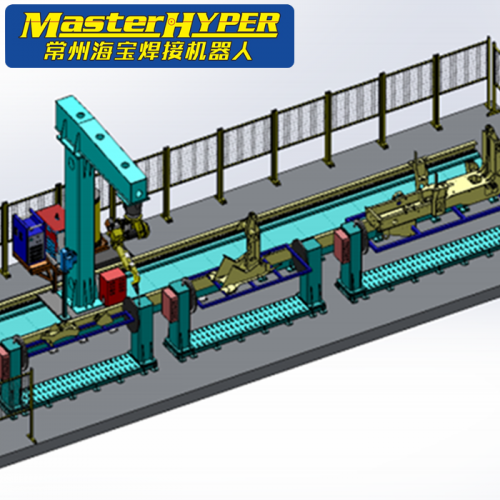
焊接机器人工作站的组成和建设
已阅读 2361 次06/12/2017如果说焊接机器人是一台独立自动化焊接设备的话,那焊接机器人工作站就是由各种单元构成的一整套机组,为完成焊接操作提供完善的功能。下面简单了解一下焊接机器人工作站的构成部分有哪些?
首先当然是核心部件之焊接机器人单元,一般的焊接机器人是由示教盒、控制盘、机器人本体及自动送丝装置、焊接电源等部分组成。可以在计算机的控制下实现连续轨迹控制和点位控制。
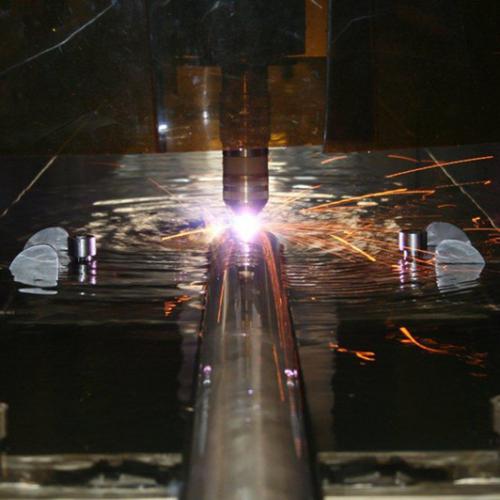
不仅如此,它还可以利用直线插补和圆弧插补功能,来焊接由直线及圆弧所组成的空间焊缝,功能十分强大。焊接机器人主要有熔化极焊接作业和非熔化极焊接作业两种类型,不仅可以长期进行焊接作业,还能保证焊接作业的高生产率、高质量和高稳定性等特点。
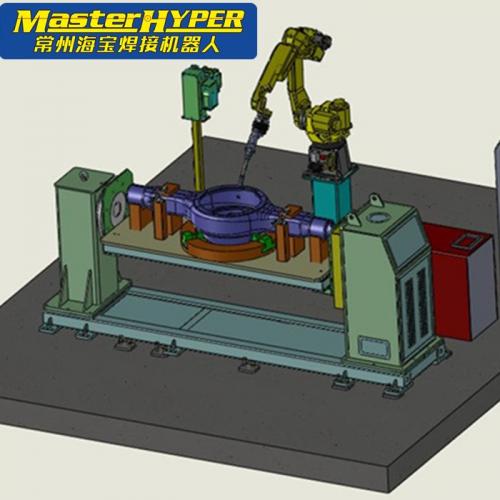
其次是电源单元和焊枪单元,都是焊接机器人工作站运行的基础;同时还有外部轴单元或焊接工作台,比如伺服行走滑台、伺服变位机、固定工作台、气动变位机、旋转台等多种方式,满足不同的工况。
除此之外,焊接机器人工作站还有夹具单元,用以固定工件,常用的有全自动电控夹具、手动阀气动夹具、手动夹具等;安装结构单元,负责焊接机器人工作站的牢固稳定,有机器人底座或整体方便移动式大底板。
另外,由PLC电气控制、操作控制台、启动按钮盒等构成的电气控制单元;安全防护单元;自动清枪站;安全工作房等也都是焊接机器人工作站不可或缺的组成部分。
工业焊接机器人已经投入到各行各业中运用,它不仅能够将焊接质量提升到更高的等级,还能将工作人员从恶劣的作业环境中解放出来,同时提高生产效率。而实现这一切的关键在于我们如何正确挑选工业焊接机器人。
首先是根据焊接所需的作业空间确定工业焊接机器人可以达到的作业空间,一般后者要大于前者是,为前者则是有焊点方位和实际焊点数量决定的,它们之间有着密切的关系。

其次作为工业焊接机器人书,它的点焊速度与出产线速度相匹配,为了达到这一标准,应先由出产线速度及待焊点数断定单点作业时刻,而机器人手的单点焊接时刻有必要小于此值。
挑选工业焊接机器人的时候,还将涉及到焊钳的挑选,以往都是按照工件形状、品种、焊缝方位选用。笔直及近于笔直的焊缝选C形焊钳,水平及水平倾斜的焊缝选用K形焊钳。
当需选用多台工业焊接机器人的前提下,应研究一下是不是选用多品种型,并与多点焊机及简易直角坐标机器人并用等问题。当机器人手之间的距离较小时,应留意动作次序的组织,可通过群控或相互间联锁效果防止干预。

其他方面的话,建议大家尽量选择内存容量大,示教功用全,操控精度高的工业焊接机器人。这样一来,不管是焊接质量还是经济效益、社会效益等方面,都将达到理想的状态。
我要评论


查看所有评论(总共0条)评论列表