
- 设备咨询热线:
13306125296 - 等离子配件咨询:









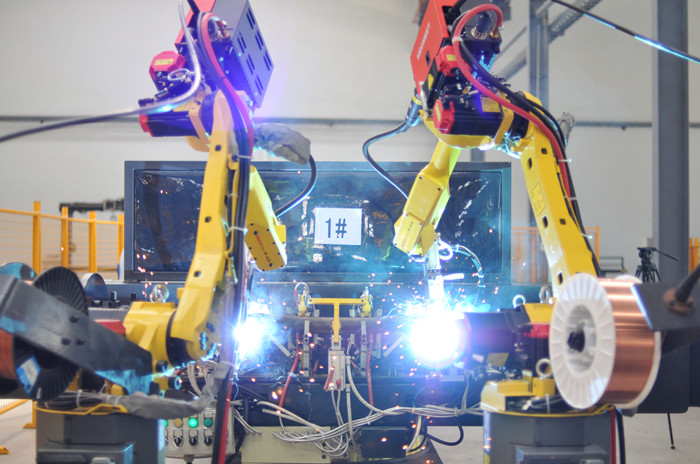




沧州华油飞达-结构件机器人自动化焊接
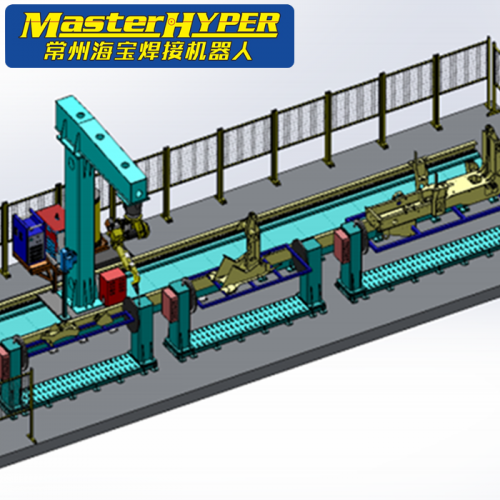
已阅读 1237 次08/17/2021一、焊接机器人系统概要
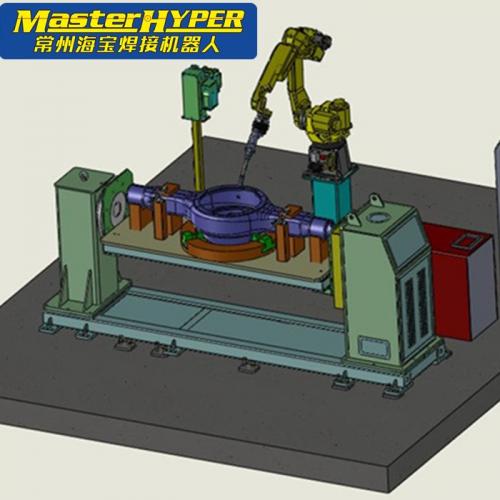
本机器人焊接系统由一台 FANUC M-10ia/8L机器人极大运动半径为2038mm,两套遥控同步电机驱动平台(尺寸1.8X3米),一套13米长度的行走路轨,长度4米的机器人行走天轨,FANUC PM400焊接系统,焊枪清枪装置,宾采尔焊枪套件,安全防护及电气控制系统等组成。每台工作站可协调联动的总轴数为7轴,机器人安装,安全、可靠。

二. 工件主要信息
序号 | 工件信息 | 内容 |
1 | 使用对象 | 钢结构工件 |
2 | 型号 | |
3 | 材质 | 碳钢、不锈钢等 |
4 | 焊接方式 | 脉冲气体保护焊 |
5 | 焊缝姿态 | 角焊缝、环缝等 |
6 | 保护气体 | 混合气体80%Ar+CO2 |
7 | 焊丝规格 | |
8 | 焊缝可达性 | ≤95%; |
9 | 表面处理 | 清理油污、等杂质,焊缝寻位处要打磨; |
10 | 零部件尺寸 | 组对间隙≤2mm,零件重复精度≤2mm。 |
三.设备规格及技术参数
机器人通过焊机的电压反馈,用焊丝端部碰触工件上 的两个基准点,来判断工件的偏差情况,并对起弧焊接的位置坐标进行 补偿调整,实现焊缝寻找功能。
1.采用该功能会延长焊接循环时间,降低生产效率。同时工件的焊缝相对 于基准点的尺寸要准确。
2.Tast(电弧感应焊缝跟踪)同样是 Lincoln 和 FANUC 基于
3.ArcLink-ArcTool 通讯软件共同开发的,简便有效的机器人焊缝跟踪功能
4.电弧跟踪原理是通过摆动焊接过程中,检测焊接电流(Welding Current) 的反馈信号,与设定值进行比较,调整焊接轨迹,使焊接位置始终保持 在焊缝中间位置。
5.电弧跟踪功能可以自动补偿焊缝位置因零件翘曲、装配不精确等产生的 偏差。可以在纵向和横向机器人运动轨迹上进行位置补偿
电弧跟踪的优点有以下四点。
(1)简单可靠、经济实用,不需要增加其他设备;
(2)焊枪可达性好,体积小;
(3)可以与焊缝起始点寻位,机器人附加轴联动功能等配合使用;
(4)他能记忆第1道焊缝跟踪的信息,在多层焊时达到事半功倍的效果。
适合的焊缝型式有:角焊缝、V 形焊缝、单边 V 形焊缝、I 形焊缝、X 形 焊缝、Y 形焊缝等多种焊缝形式;
四.焊接机器人焊接系统
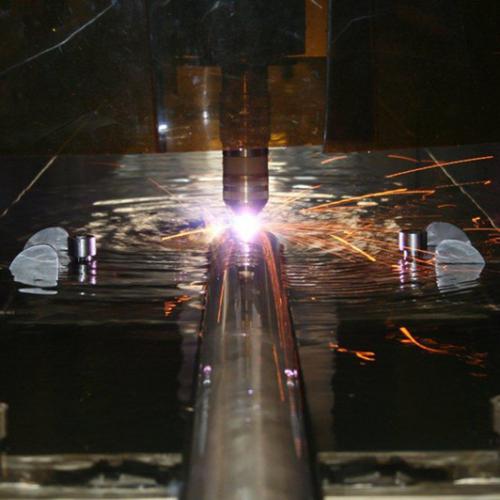
1.SFP焊的很佳熔滴过渡形式是一个脉冲过渡一个熔滴。这样通过调节脉冲频率就能够改变单位时间内熔滴过渡的滴数,也就是焊丝熔化速度。
2.射滴过度形式提高了焊丝的熔化系数,也就是提高了焊丝的熔化效率。焊接速度可提高30%。
3.焊缝成形良好,熔宽较大,指状熔深特点减弱,余高小,由于一脉一滴的射滴过度,熔滴直径大致与焊丝直径相等,且熔滴电弧热较低,所有焊缝成形晶粒细、强度高。
4.电弧指向性好,适合全位置焊接。
5.噪声较普通焊机明显降低,干扰减少,操作时更舒适,精力也更集中。
6.脉冲气保焊机是利用脉冲电流时间射滴过度,能实现无飞溅焊接,免除清理焊缝表面飞溅物的劳动,使焊缝成型更加美观,同时,因熔滴温度低焊接烟雾少,大大改善了施工环境。
7.以16毫米的碳钢为例,焊接速度平均为400mm/min,工件所需的焊接长度约为9700mm,即机器人所需焊接时间约为24.25分钟。
五.宾采尔500机器人焊枪
枪体外套管是由一整块特质高钢性不锈钢通过 CNC 设备整体加工而成, 非常强壮,同时和内层枪管之间留有足够空间,当配合 特雷克斯高吸能防碰撞传 感器工作时,即使发生碰撞也不用重新校枪,机器人 TCP 点基本不变,这样 就节约了大量的机器人停机维护时间。



我要评论


查看所有评论(总共0条)评论列表