
- 设备咨询热线:
13306125296 - 等离子配件咨询:









常宝新闻
联系我们




常宝首页 > 公司新闻动态 > 机器人焊接铝模板工作站动作流程机器人焊接铝模板工作站动作流程
机器人焊接铝模板工作站动作流程
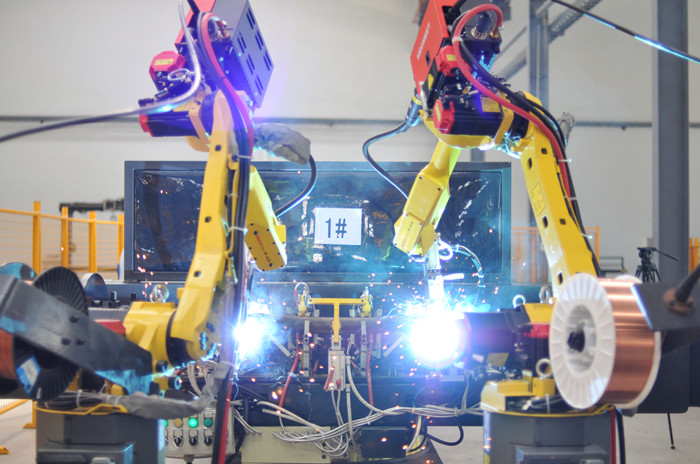
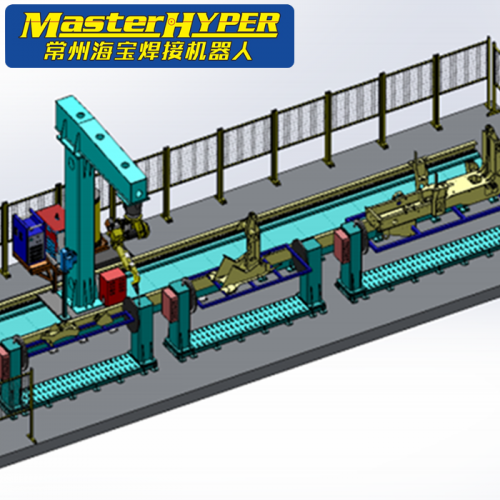
已阅读 1053 次09/07/2021本工作站采用双机器人双工作平台焊接,保证机器人的利用率,并且设备满足24小时三班连续工作能力。
该机器人系统由机器人本体、机器人控制系统、机器人示教器、弧焊软件包、标准机器人专用焊枪、机器人底座、机器人防碰撞装置、清枪减丝装置、焊接电源等构成。

机器人系统主要构件:2台弧焊机器人本体及控制系统、2套焊接电源、2套专业工装及平台等主要部件所组成的高效机器人系统,可实现一边组对工件另一边自动焊接,高效率的机器人焊接工作站系统。
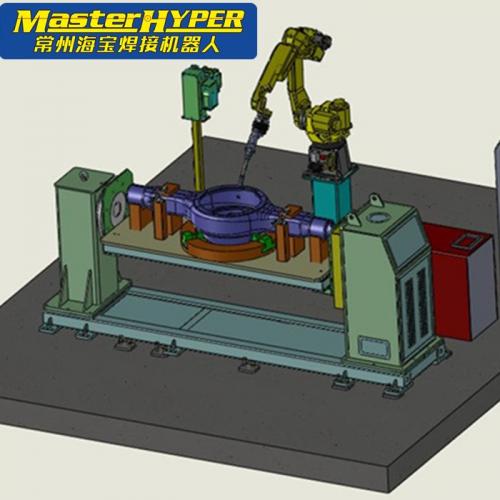
工装平台为定制工装,工装采用气缸配合快夹进行定位,定位重复精度可满足焊接要求,并提高焊接效率。本工装实现快速夹紧、定位,防止工件受力变形,大幅度提高焊接效率。

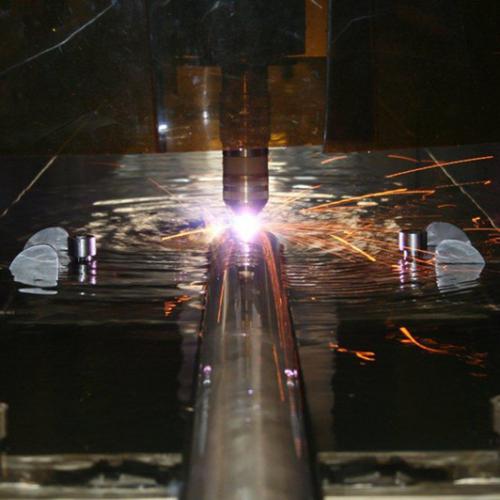
机器人焊接工作站动作流程
将铝模板零件依次放置工装上进行组对→通过自动及手动辅助将工件定位夹紧完成→启动机器人→弧焊机器人开始自动寻位(此时操作人员在另一工装平台上组对工件)→起弧焊接→逐步焊接至焊接完毕→焊接完成后机器人步入另一工位已组对完成的工件进行焊接→卸下上一工位已焊接完成的工件→开始组对新工件→进入下一循环。

配置清单
序号 | 名称 | 型号及配置 | 生产厂家 | 数量 | 备注 | |
一、机器人系统 | ||||||
1 | 弧焊机器人本体 | RBT-ARC6-R1440 | 2套 | |||
2 | 控制柜 | 常州海宝 | 2套 | |||
3 | 示教器 | 常州海宝 | 2套 | |||
4 | 基本软件包 | 常州海宝 | 2套 | |||
5 | 系统连线总成 | 常州海宝 | 2套 | |||
二、焊接系统 | ||||||
1 | 焊接电源 | KEMPARC PULSE 350 | 芬兰KEMPPI | 2套 | ||
2 | 送丝机 | KEMPARC DT400 | 芬兰KEMPPI | 2套 | ||
3 | 制冷水箱 | 常州海宝 | 1套 | |||
4 | 机器人专用水冷焊枪 | TBI 7W | 德国TBI | 2套 | ||
5 | 焊枪夹持器 | 常州海宝 | 2套 | |||
6 | 防碰撞 | Crashguard MINI | 德国TBI | 2套 | ||
三、周边设备 | ||||||
1 | 自动化工装 | 常州海宝 | 2套 | |||
2 | 机器人底座 | 常州海宝 | 2套 | |||
3 | 平衡器 | 常州海宝 | 2套 | |||
四、系统控制设备 | ||||||
1 | 外部急停控制装置 | 常州海宝 | 1套 | |||

暂无评论
我要评论


查看所有评论(总共0条)评论列表