
- 设备咨询热线:
13306125296 - 等离子配件咨询:







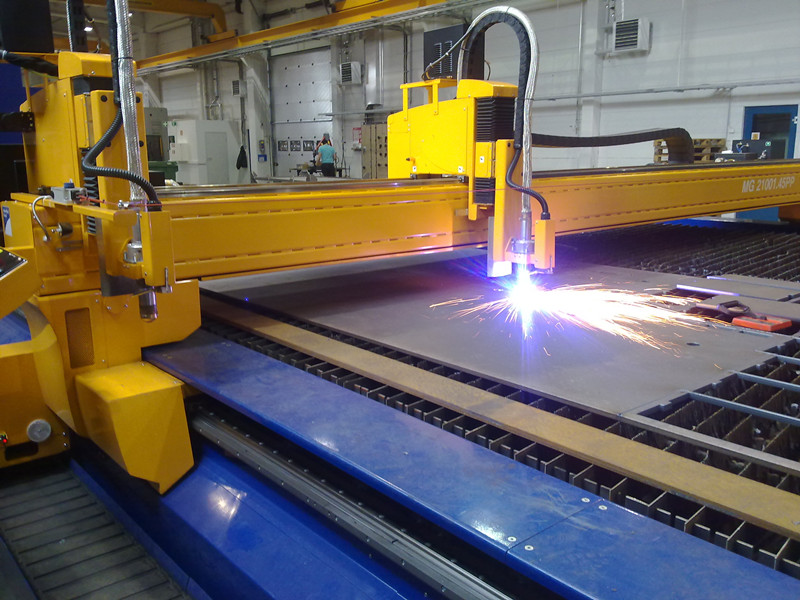








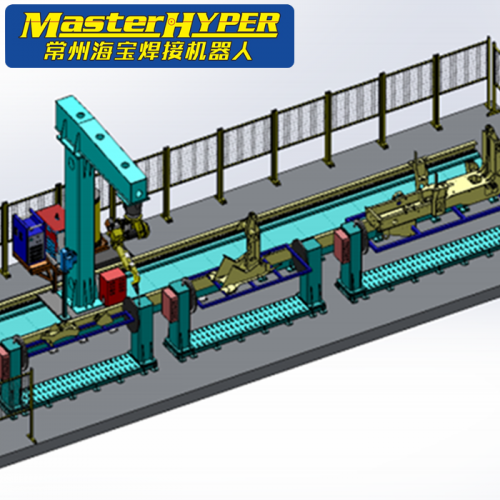
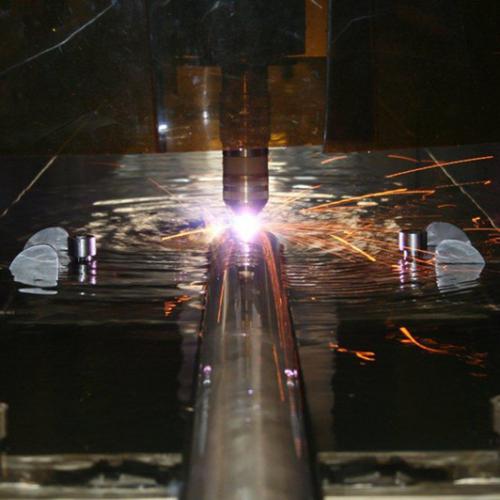
针对大型结构件焊接的自动化升级需求,设计爬壁机器人系统.该系统由移动平台,焊枪调节机构,激光视觉传感器,控制系统和焊接设备组成;由激光视觉传感器获取焊接路径信息;通过协调移动平台与焊枪调节机构实现对焊缝的跟踪焊接.试验结果表明:该系统在船体分段模型焊接作业中运行平稳,焊缝成形较好,能够满足大型结构件的焊接要求.
立即咨询

暂无评论
我要评论
其他产品




新品推荐





针对大型结构件焊接的自动化升级需求,设计爬壁机器人系统.该系统由移动平台,焊枪调节机构,激光视觉传感器,控制系统和焊接设备组成;由激光视觉传感器获取焊接路径信息;通过协调移动平台与焊枪调节机构实现对焊缝的跟踪焊接.试验结果表明:该系统在船体分段模型焊接作业中运行平稳,焊缝成形较好,能够满足大型结构件的焊接要求.
评论列表